Language is a representation of our world and so is perception - both language and vision are trying to solve the same problem.We saw in section that a prediction task can be used to learn a representation of a word - recall we are predicting the words that are frequent closeby. This type of task is called a pretext task. The idea is that if we learn a prediction task that dependents on a representation and our predictions are correct, then we have learned a good representation.This is a very general idea and it applies to many different domains. For example, in vision, we can use a pretext task to learn a representation of an image by predicting the pixels in the image. This is called self-supervised learning because we are using the data itself to supervise the learning process.Learning under these settings
In NLP labeled data for representation learning are plentiful but in computer vision they are quite scarce. When we don’t have labeled targets we try to create virtual targets out of the raw data itself. This idea is called self-supervision. It looks like this:where V1 and V2 are two different functions of the full data
tensorX. For example, V1 might be the left side of the
image X and V2 could be the right side, so the pretext
task is to predict the right side of an image from its left side. In
fact, several of the examples we gave previously for predictive learning
are of the self-supervised variety: supervision for predicting a future
frame, or a next pixel, can be cooked up just by splitting a video into
past and future frames, or splitting an image into previous and next
pixels in a raster-order sequence.
Dimensionality reduction and clustering algorithms learn compressed representations by creating an information bottleneck, that is, by constraining the number of bits available in the representation. An alternative compression strategy is to supervise what information should be thrown away. Contrastive learning is one such approach where a representation is supervised to be invariant to certain viewing transformations, resulting in a compressed representation that only captures the properties that are common between the different data views. Two different data views could correspond to two different cameras looking at the same scene or two different imaging modalities, such as color and depth, and we will see more examples subsequently.
Contrastive learning is actually more closely related to clustering than it may at first seem. Contrastive learning maps similar datapoints to similar embeddings. Clustering is just the extreme version of this where there are only k distinct embeddings and similar datapoints get mapped to the exact same embedding.
Learning invariant representations is classic goal of computer vision.
Recall that this was one of the reasons we used convolutional image
filters: convolution is equivariant with camera translation, and
invariance can then be achieved simply by pooling over filter responses.
CNNs, through their convolutional architecture, bake translation
invariance into the hypothesis space. In this section we will see how
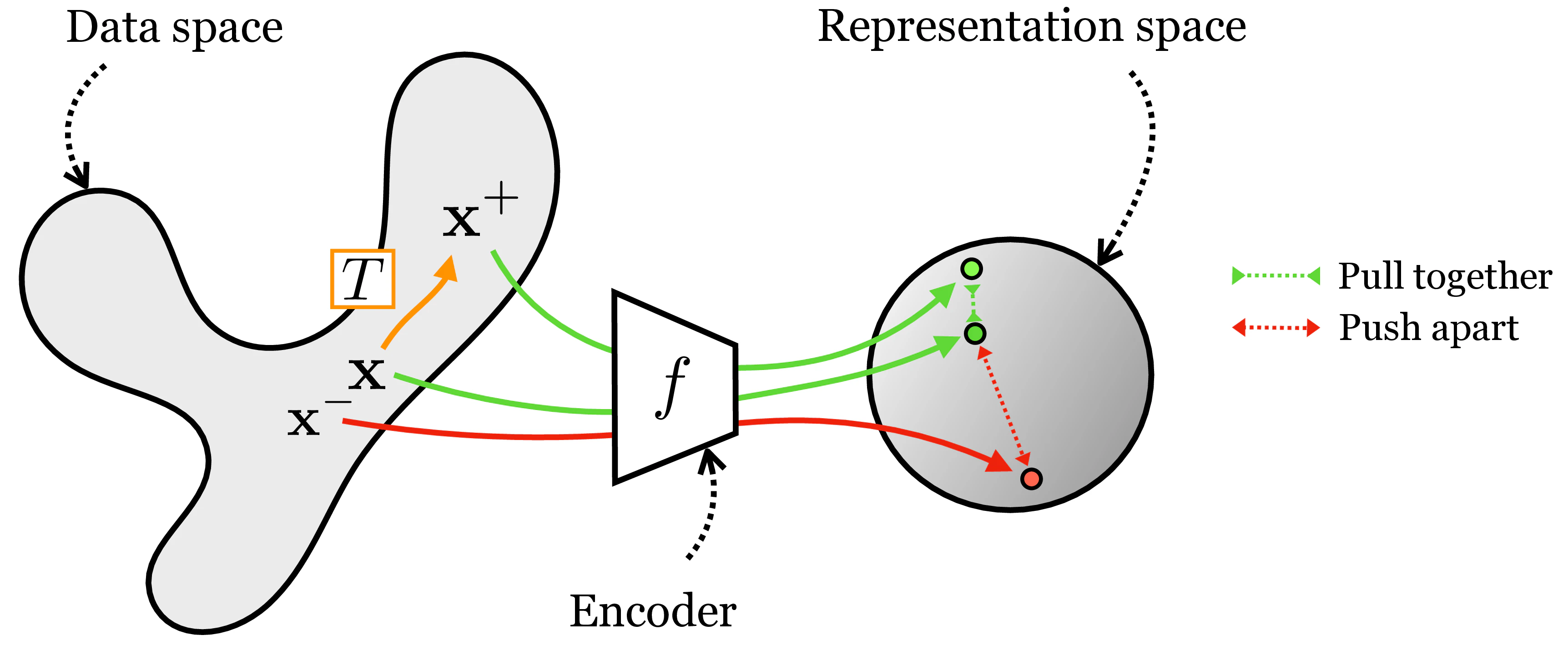
to incentivize invariances instead through the objective function.The idea is to simply penalize deviations from the invariance we want.
Suppose T is a transformation we wish our representation to be
invariant to. Then we may use a loss of the form
∥f(T(x))−f(x)∥22 to learn an
encoder f that is invariant to T. We call such a loss an
alignment loss (Wang & Isola, 2020).That seems easy enough, but you may have noticed a flaw: What if f
just learns to output the zero vector all the time? Trivial alignment
can be achieved when there is representational collapse, and all
datapoints get mapped to the same arbitrary vector.Contrastive learning fixes this issue by coupling an alignment loss with
a second loss that pushes apart embeddings of datapoints for which we do
not want an invariant representation. The supervision for contrastive
learning comes in the form of positive pairs and negative pairs.
Positive pairs are two datapoints we wish to align in z-space; if we
wish for invariance to T then a positive pair should be constructed as
{x,x+} with x+=T(x).
Negative pairs, {x,x−}, are two datapoints that
should be represented differently in z-space. Commonly, negative pairs
are randomly constructed by sampling two datapoints independently and
identically from the same data distribution, that is,
x∼pdata(x) and
x−∼pdata(x). Given such data
pairings, the objective is to pull together the positive pairs and push
apart the negative pairs, as illustrated in
figure.This kind of contrastive learning results in an embedding that is
invariant to a transformation T. Extending this to achieve invariance
to a set of transformations {T1,…,Tn} is straightforward:
just apply the same loss for each of T1,…,Tn.A second kind of contrastive learning is based on co-occurrence, where
the goal is to learn a common representation of all co-occurring
signals. This form of contrastive learning is useful for learning, for
example, an audiovisual representation where the embedding of an image
matches the embedding of the sound for that same scene. Or, returning to
our colorization example, we can learn an image representation where the
embedding of the grayscale channels matches the embedding of the color
channels. In both these cases we are learning to align co-occurring
sensory signals. This kind of contrastive learning is schematized in
figure.In figure, we
refer to the two co-occurring signals---color and grayscale---as two
different views of the total data tensor X, just like we
did in the previous sections: x=V1(X),
y=V1(X). You can think of these views either as
resulting from sensory co-occurrences or as two transformations of
X, where the transformation in the color example is channel
dropping. Thus, the two kinds of contrastive learning we have presented
are really one and the same: any two signals can be considered
transformations of a combined total signal, and any signal and its
transformation can be considered two co-occurring ways of measuring the
underlying world.Nonetheless, it is often easiest to conceptualize these two approaches
separately, and next we give learning diagrams for each:In these diagrams, D is a distance function. Above we give just one
simple form for the contrastive objective; many variations have been
proposed. Three of the most popular are (1) Hadsell et al.’s
“constrastive loss” (Hadsell et al., 2006) (an older definition of
the term, now overloaded with our more general notion of a contrastive
loss being the broader family of any loss that pulls together positive
samples and pushes apart negative samples), (2) the triplet loss
(Chechik et al., 2010), and (3) the InfoNCE loss (van den Oord et al., 2018).
Hadsell et al.’s contrastive loss and the triplet loss add the concept
of a margin to the vanilla formulation: they only push/pull when the
distance is less than a specified amount m (called the margin),
otherwise points are considered far enough apart (or close enough
together). The InfoNCE loss is a variation that treats establishing a
contrast as a classification problem: it tries to move points apart
until you can classify the positive sample, for a given anchor,
separately from all the negatives. The general formulation of these
losses takes as input an anchor x, a positive example
x+, and one or more negative examples x−. The
positive and negative may be defined based on transformations,
coocurrences, or something else. The full learning objective is to sum
over many samples of anchors, positives, and negatives, producing a
sampled set evaluated according to the losses as follows:L(x,x+,x−)L(x,x+,x−)L(x,x+,{xi−}i=1N)=max(D(f(x),f(x+)−mpos,0)−max(mneg−D(f(x),f(x−),0)◃Hadsell et al. contrastive=max(D(f(x),f(x+))−D(f(x),f(x−))+m,0)◃triplet=−logef(x)Tf(x+)/τ+∑ief(x)Tf(xi−)/τef(x)Tf(x+)/τ◃InfoNCENotice that the InfoNCE loss is a log softmax
over a vector of scores f1(x)Tf2(c)/τ with
c∈{x+,x1−,…,xN−}; you
can therefore think of this loss as corresponding to a classification
problem where the ground truth class is x+ and the other
possible classes are {x1−,…,xN−} (refer
to section to revisit softmax
classification).
Wang and Isola (Wang & Isola, 2020) showed that the contrastive loss
(specifically the InfoNCE form) encourages two simple properties of the
embeddings: alignment and uniformity. We have already seen that
alignment is the property that two views in a positive pair will map to
the same point in embedding point, that is, the mapping is invariant to
the difference between the views. Uniformity comes from the negative
term, which encourages embeddings to spread out and tend toward an
evenly spread, uniform distribution. Importantly, for this to work out
mathematically, the embeddings must be normalized, that is, each
embedding vector must be a unit vector. Otherwise, the negative term can
push embeddings toward being infinitely far apart from each other.
Fortunately, it is standard practice in contrastive learning (and many
other forms of representation learning) to apply L2 normalization to
the embeddings. The result is that the embeddings will tend toward a
uniform distribution over the surface of the M-dimensional
hypersphere, where M is the dimensionality of the embeddings. See
theorem 1 in (Wang & Isola, 2020) for a formal statement of this fact.A result of this analysis is we may explicit decompose contrastive
learning into one loss for alignment and another for uniformity, with
the following forms:Lalign(f;α)Lunif(f;t)L(f;α,t,λ)=E(x,x+)∼ppos[f(x)−f(x+)2α]=logEx∼pdata,x−∼pdata[e−t∥f(x)−f(x−)∥22]=Lalign(f;α)+λLunifwhere ppos is the distribution of positive
pairs and α, t, and λ are hyperparameters of the
losses.
Here, we use the pretext task idea on a supervisory signal of the natural language to create a representation of the scene it describes.CLIP is a contrastive method (see
section) in which
one data view is the image and the other is a caption describing the
image. Specifically, CLIP is a form of contrastive learning from
co-occurring visual and linguistic views that is formulated as follows:where ℓ represents an image, t represents
text, Sdz represents the space of unit vectors of
dimensionality dz (i.e., the surface of the [dz−1]-dimensional
hypersphere), fℓ is the image encoder, ft is the text
encoder, image inputs are represented as [3×N×M] pixel
arrays, text inputs are represented as dt dimensional tokens, and
dz is the embedding dimensionality. Notice that the objective is a
symmetric version of the InfoNCE loss defined in
equation. Also notice that fℓ and
ft both output unit vectors (which is achieved using
L2-normalization before computing the objective); this ensures that
the denominator cannot dominate by pushing negative pairs infinitely far
apart.
The idea of visual learning by image captioning actually has a
long history before CLIP. One important early paper on this topic is
(Ordonez et al., 2011).
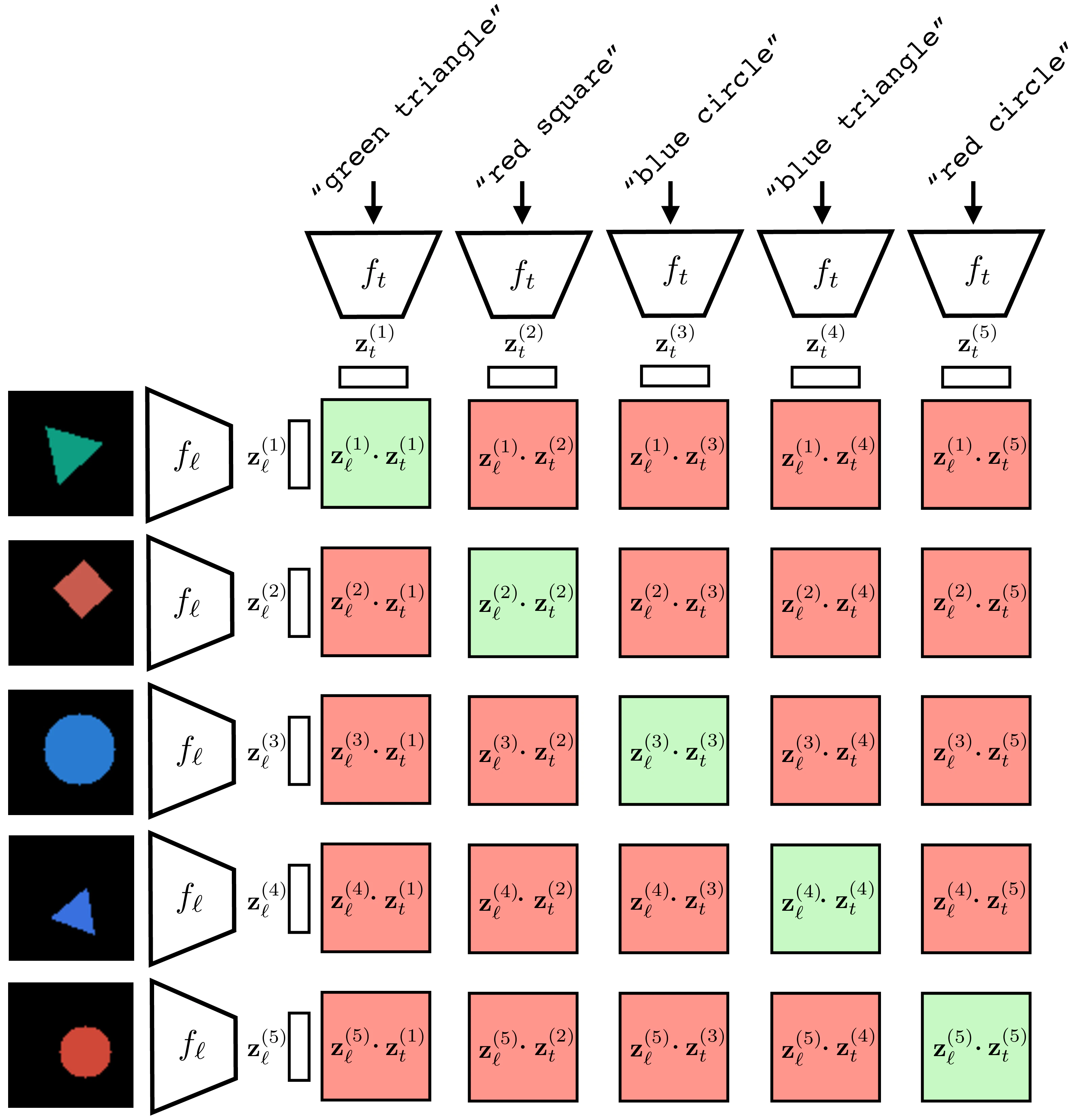
figure visually depicts how CLIP is
trained. First we sample a batch of N language-image pairs,
{t(i),ℓ(i)}i=1N (N=6 in the
figure). Next we embed measure the dot product between all these text
strings and images using a language encoder ft and an image encoder
fℓ, respectively. This produces a set of text embeddings
{zt(i)}i=1N and a set of image embeddings
{zℓ(i)}i=1N. To compute the loss, we take the
dot product zℓ(i)⋅zt(j) for all
i,j∈{1,…,6}. Terms for which i=j are the negative
pairs and we seek to minimize these dot products (denominator of the
loss); terms for which i==j are the positive pairs and we seek to
maximize these dot product (they appear in both the numerator and
denominator of the loss).After training, we have a text encoder ft and an image encoder
fℓ that map to the same embedding space. In this space, the angle
between a text embedding and an image embedding will be small if the
text matches the matches.
The dot product between
unit vectors is proportional to the angle between the
vectors.
figure shows how a
trained CLIP model maps data to embeddings. This figure is generated in
the same way as figure: for each encoder we
reduce dimensionality for visualization using t-distributed Stochastic
Neighbor Embedding (t-SNE) (van der Maaten & Hinton, 2008). For the image encoder, we show
the visual content using icons to reflect the color and shape depicted
in the image (we previously used the same visualization in section).It’s a bit hard to see, but one thing you can notice here is that for
the image encoder, the early layers group images by color and the later
layers group more by shape. The opposite is true for the text encoder.
Why do you think this is? One reason may be that color is a superficial
feature in pixel-space while shape requires processing to extract, but
in text-space, color words and shape words are equally superficial and
easy to group sentences by.After passing the data through these two encoders, the final stage is to
normalize the outputs and compute the alignment between the image and
text embeddings. figure shows
this last step. After normalization, all the embeddings line on the
surface of a hypersphere (the circle in the figure). Notice that the
text descriptions are embedded near the image embeddings (icons) that
match that description. It’s not perfect but note that this is partially
due to limitations in the visualization, which projects the
768-dimensional CLIP embeddings into a 2D visualization. Here we use
kernel principle component analysis (Schölkopf et al., 1998) on the
embeddings, with a cosine kernel, and remove the first principle
component as that component codes for a global offset between the image
embeddings and text embeddings.Using language as one of the views may seem like a minor variation on
the contrastive methods we saw previously, but it’s a change that opens
up a lot of new possibilities. CLIP connects the domain of images to the
domain of language. This means that many of the powerful abilities of
language become applicable to imagery as well. One ability that the CLIP
paper showcased is making a novel image classifier on the fly. With
language, you can describe a new conceptual category with ease. Suppose
I want a classifier to distinguish striped red circles from polka dotted
green squares. These classes can be described in English just like that:
“striped red circles” versus “polka dotted green square.” CLIP can then
leverage this amazing ability of English to compose concepts and
construct an image classifier for these two concepts.Here’s how it works. Given a set of sentences
{ta,tb,…} that describe images of
classes a, b, and so on,
Embed each sentence into a z-vector,
zta=ft(ta),ztb=ft(ta),
and so on.
Embed your query image into a z-vector,
zℓq=fℓ(ℓq).
See which sentence embedding is closest to your image embedding;
that’s the predicted class.
These steps are visualized in figure.
The green outlined dot product is the highest, indicating that the query
image will be classified as class a, which is defined as “striped red
circles.”figure gives more examples of creating
custom binary classifiers in this way. The two classes are described by
two text strings (“triangle” versus “cricle”; “purple” versus “teal”;
and “arrowhead” versus “ball”). The embeddings of the text descriptions
are the red and green vectors. The classifier simply checks where an
image embedding is closer, in angular distance, to the red vector or the
green vector. This approach isn’t limited to binary classification: you
can add more text vectors to partition the space in more ways.




. To reduce dimensionality we apply t-SNE (van der Maaten & Hinton, 2008) separately for the text encoder and the image encoder. Within each encoder, we run t-SNE jointly across all shown layers.](https://mintcdn.com/aegeanaiinc/RpSdlNrADkUnIzZe/aiml-common/lectures/VLM/clip/images/clip_mapping_diagram_two_branch.png?fit=max&auto=format&n=RpSdlNrADkUnIzZe&q=85&s=ee242715855fcbe5a64c0be2bcc18992)





