
| Approach | Description |
|---|---|
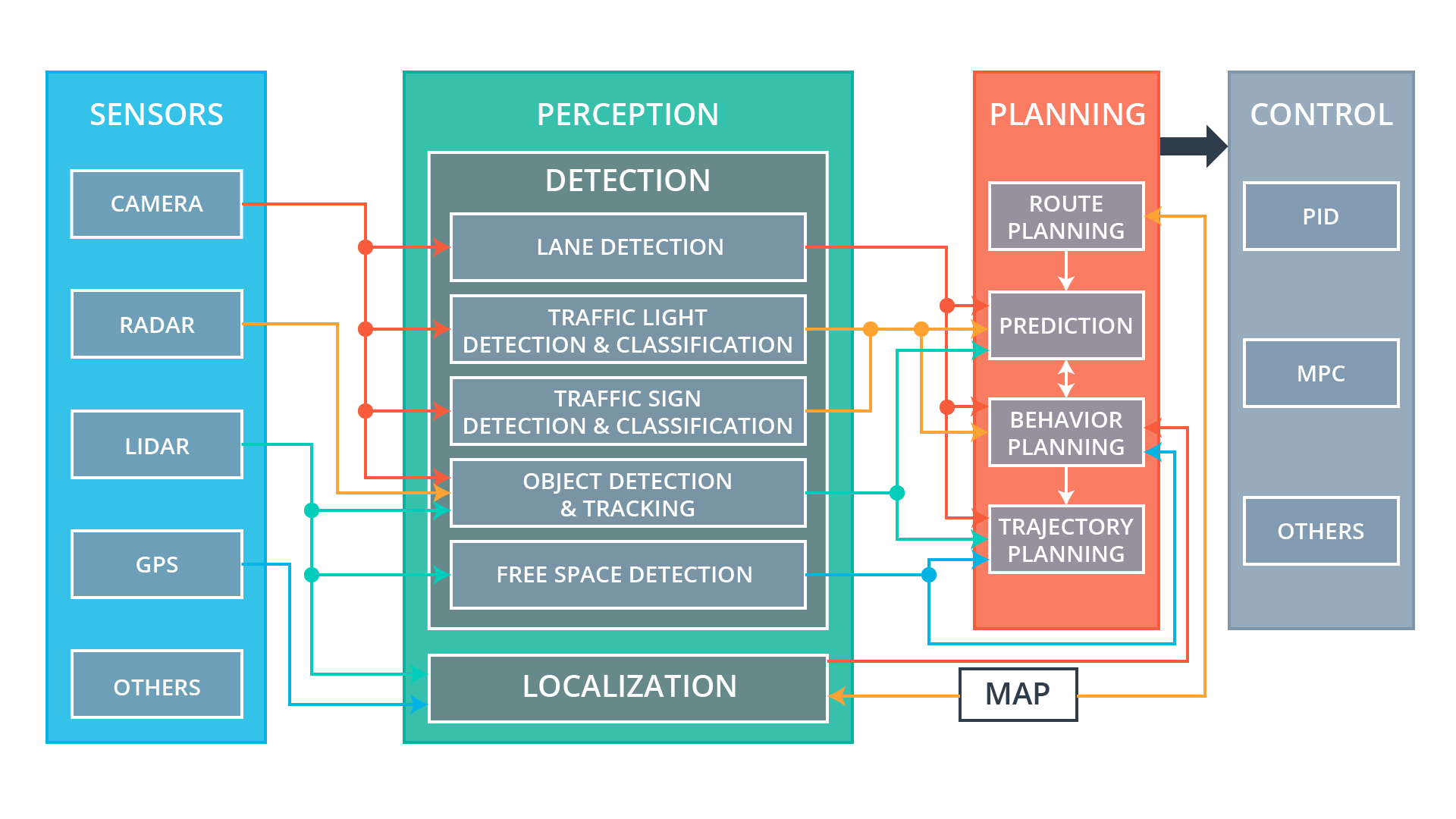
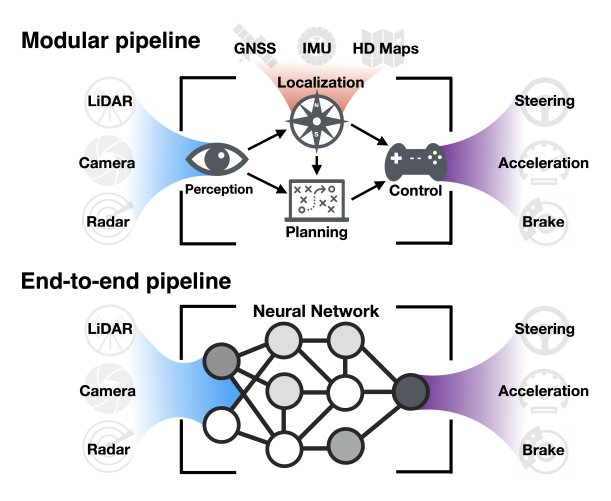
| Modular Pipeline | In the modular architecture in here sensors, perception, planning and control subsystems that work together to achieve the task at hand. |
| End-to-End Pipeline | In end-to-end approach the entire pipeline of transforming sensory inputs to driving commands is treated as a single learning task. This is what we also call Imitation Learning (IL) and is used to determine from only pixel input the steering and acceleration controls of a vehicle. Apart from IL, Reinforcement Learning (RL) can also be used in a simulator setting to transfer the learned optimal policy in the real-world. This is covered in a separate section. |
Modular Pipeline
The modular pipeline as shown below, consists of four main modules: NOTE: In the description below the local planning module mentioned in the figure is called trajectory generation.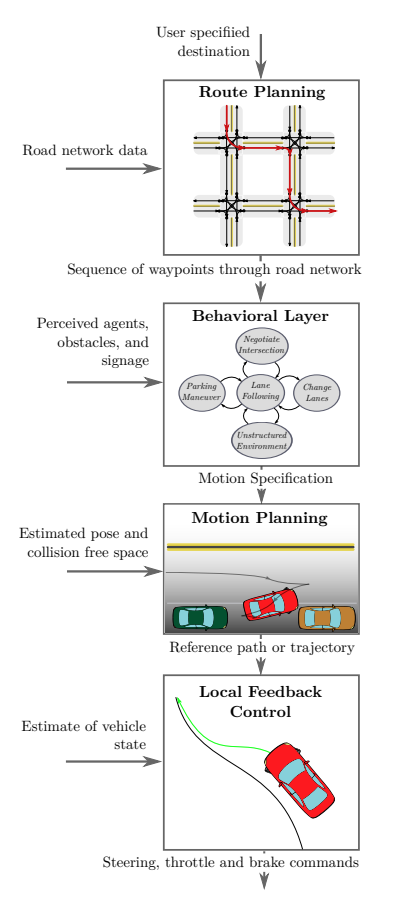
- Global (Route) planning. In global route planning we are given a graph and the agent must solve the problem of finding a shortest path (cost) route from the source vertex to a destination or goal . The route planning scenarios can be fairly complicated involving a mixture of road network restricted and unrestricted (eg. parking lot) modes. Route planning is usually decoupled from the other latency-sensitive subsystems of planning - it is being very infrequently executed.
- Prediction. This involves estimations of what other agents active in the same locale as the agent of interest will do next.
- Behavioral decision making. Makes a decision of the best action that the agent should make given the predictions of the other agents perceived intentions, signal and traffic sign detections.
- Trajectory generation. The action decided by the behavioral planning module, is translated to a trajectory. The control subsystem will attempt to follow it as close as possible.
