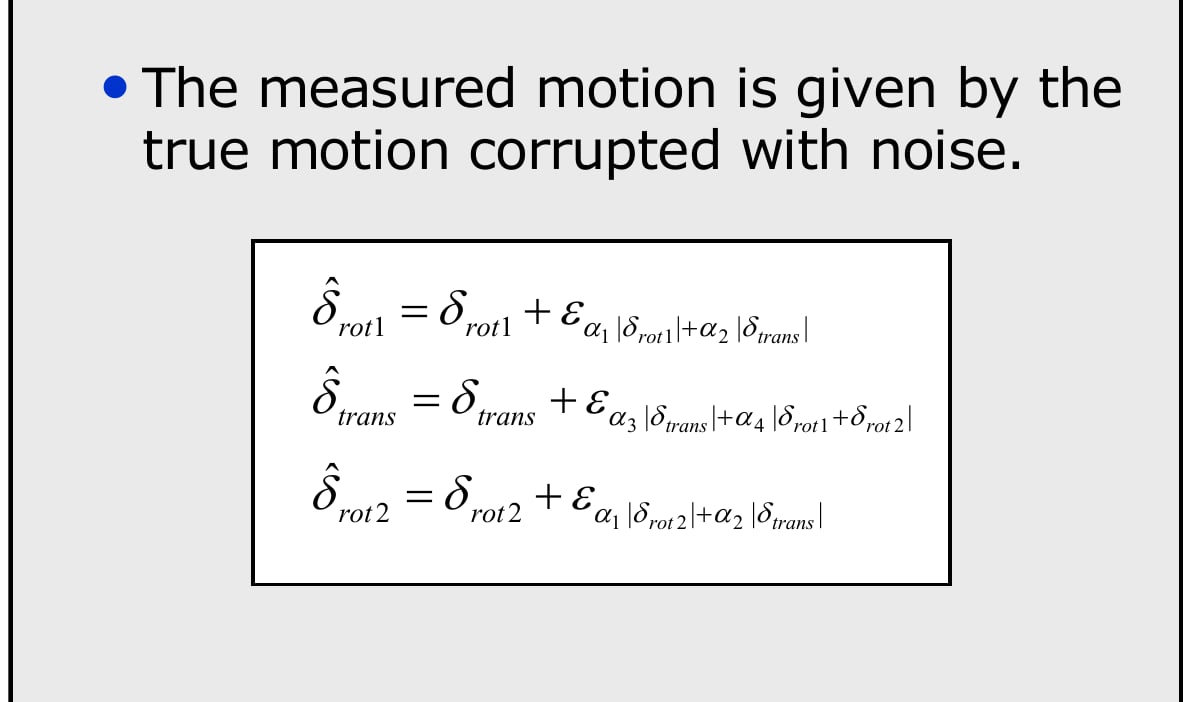
Odometry Motion Model
Odometry is commonly obtained by integrating wheel encoders information; most commercial robots make such integrated pose estimation available in periodic time intervals (e.g., every tenth of a second).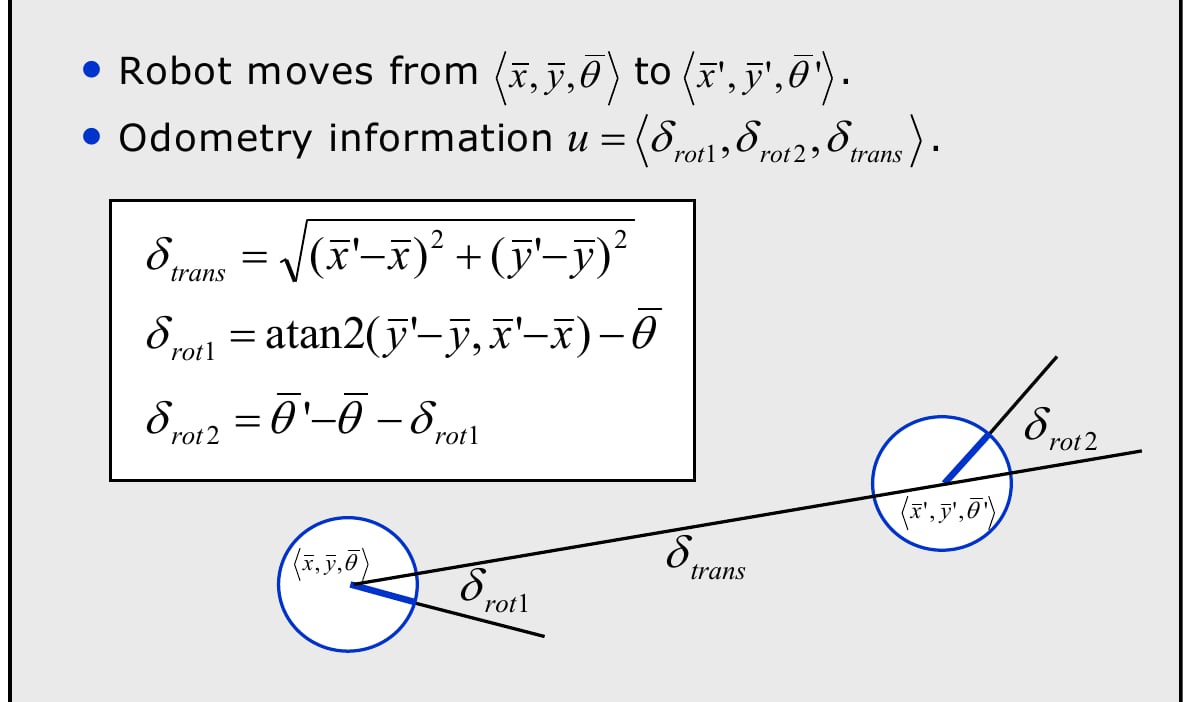
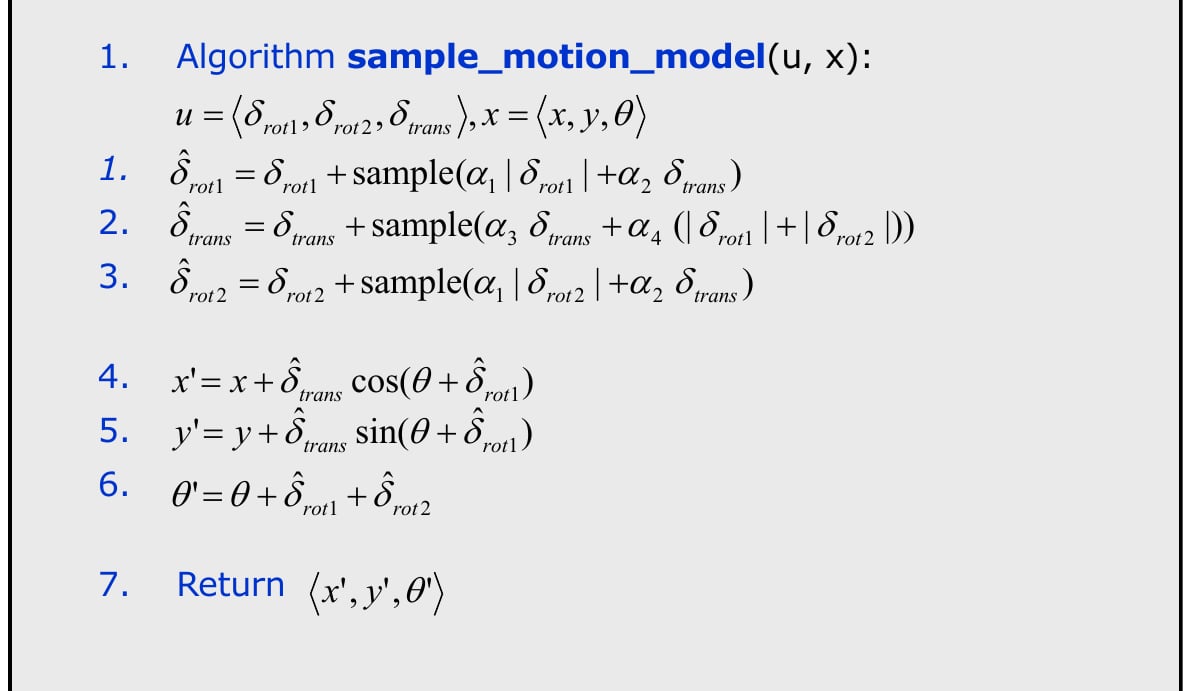
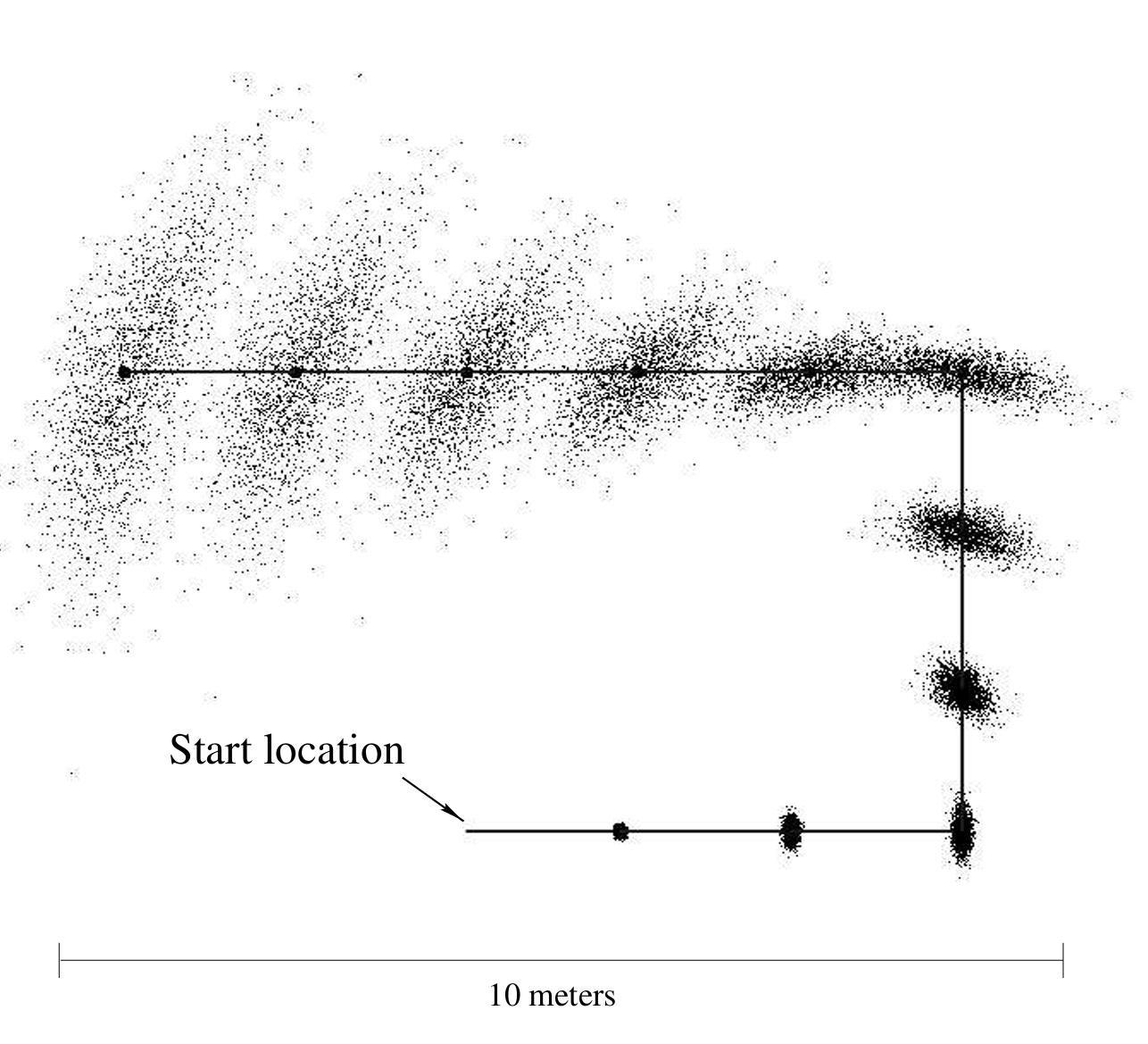
Odometry models and motion planning for mobile robots.