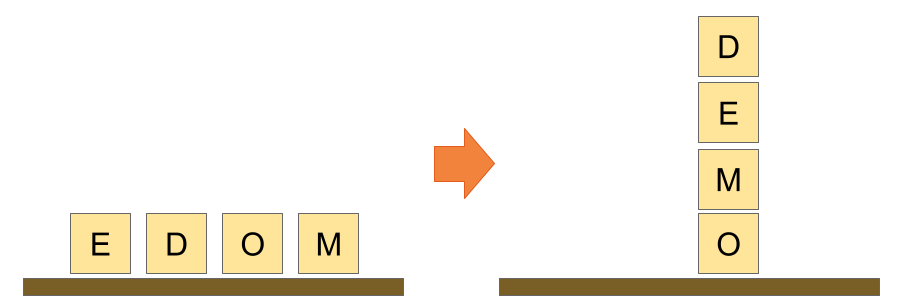
Key Concepts
- Domain Definition: Defining predicates like
on,ontable,clear,holding - Actions:
pick-up,put-down,stack,unstack - Goal States: Specifying desired block configurations
- Plan Generation: Using planners to find action sequences
This tutorial uses the Unified Planning Library, a Python library that provides a unified interface to multiple planning engines.
Run the Tutorial
Open the blocksworld demo in Google Colab to execute the code interactively.