= bayes_filter( for all do: (prediction) (measurement update) endfor
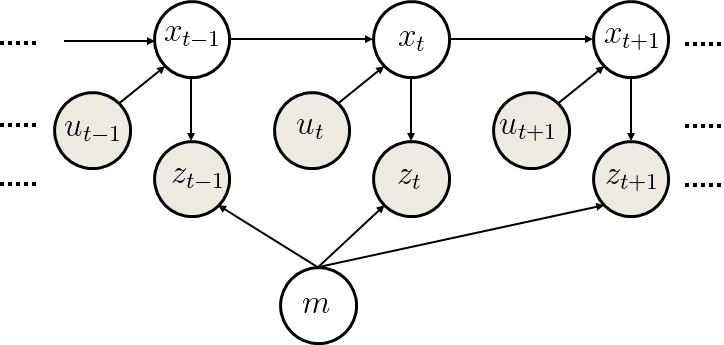
What distinguishes localization from tracking is that for localization, the initial belief is: where is the number of states (poses) that the robot can have. To illustrate the localization problem solution with probabilistic reasoning lets consider an simple environment with a corridor and three doors.
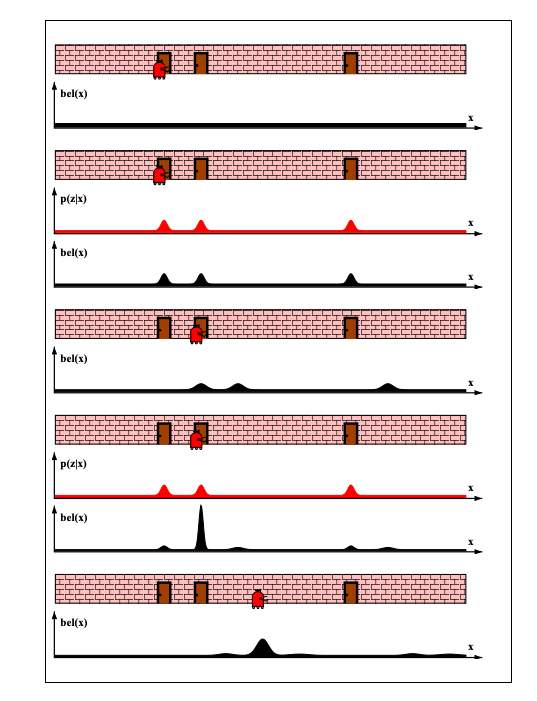
- Our initial belief is obviously uniform over all poses, as illustrated in row 1.
- The agent uses its perception that indicates that it is adjacent to one of the doors, which in effect means that the shape of is as shown in the 2nd row.
- It multiplies its previous belief with this distribution during measurement update producing the new belief as shown in the 2nd row (black pdf). The resulting belief is multi-modal, reflecting the residual uncertainty of the agent at this point.
- As the agent moves to the right, it convolves (the integral in the Bayes filter is a convolution) its belief with the transition (motion) model . It still does not know where it is - all it knows that its belief needs to follow what its odometry sensors told it which is a move to the right by so many meters. The effect is visualized in row 3 that shows a shifted (by the odometric information) and slightly less peaked (movement reduces confidence) belief.
- The final measurement update that multiplies with results into obtaining a belief where most of the probability mass is focused on the correct pose.
- As the agent moves further to the right, the transition (motion) model convolutions reduce the confidence of the agent as the perception system is effectively inactive due to the lack of distinguishing features in its locale.
Tracking
Just like localization, tracking can refer to location prediction of the agent itself or the objects that the agents perceives in its environment. For tracking we are given the initial pose that is approximately known. It is common to initialize the belief with a narrow Gaussian distribution around . Lets look at a similar example to the localization problem:References
- Hofmann, M., Wolf, D., Rigoll, G. (2013). Hypergraphs for Joint Multi-view Reconstruction and Multi-object Tracking. 2013 IEEE Conference on Computer Vision and Pattern Recognition.
- Khan, Z., Balch, T., Dellaert, F. (2004). A Rao-Blackwellized particle filter for EigenTracking. Proceedings of the 2004 IEEE Computer Society Conference on Computer Vision and Pattern Recognition, 2004. CVPR 2004..
- Li, X., Ylioinas, J., Kannala, J. (2018). Full-Frame Scene Coordinate Regression for Image-Based Localization.
- Peršić, J., Petrović, L., Marković, I., Petrović, I. (2019). Spatio-Temporal Multisensor Calibration Based on Gaussian Processes Moving Object Tracking.
- Sabinasz, D. (2017). Robot Localization II: The Histogram Filter.