Key Concepts
- Prior and Posterior Distributions: How beliefs are updated with new information
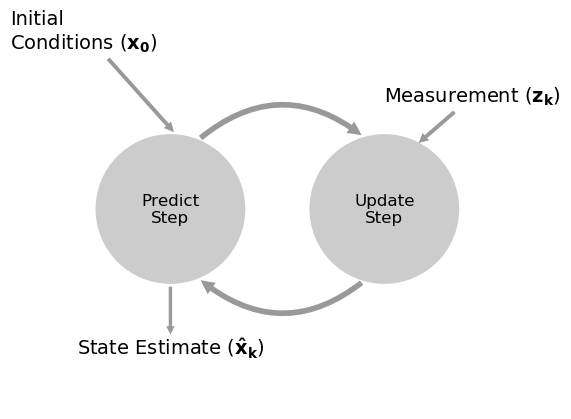
- Prediction Step: Incorporating movement uncertainty through convolution
- Update Step: Using Bayes’ theorem to incorporate measurements
- Multimodal Distributions: Handling multiple hypotheses about position
This section is adapted from the excellent book Kalman and Bayesian Filters in Python by Roger Labbe.
Run the Tutorial
Open the original interactive notebook in Google Colab to execute the code and explore the concepts.
Notebook Preview
Discrete Bayes Filter Tutorial (read-only preview via nbviewer)
References
- Frazier, P. (2018). A Tutorial on Bayesian Optimization.
- Karl, M., Soelch, M., Bayer, J., Smagt, P. (2016). Deep Variational Bayes Filters: Unsupervised Learning of State Space Models from Raw Data.
- Lukežič, A., Vojíř, T., Čehovin, L., Matas, J., Kristan, M. (2016). Discriminative correlation filter with channel and Spatial Reliability.
- Wilson, A., Knowles, D., Ghahramani, Z. (2011). Gaussian Process Regression Networks.