1. Problem and premise
Robots expose their behavior through low-level interfaces: topics, services, launch files, parameters. Engineers who have memorized these can operate a robot quickly. Everyone else, field operators, domain experts, students, and even the engineers themselves when they are debugging, would rather say what they want in plain language and let a capable agent figure out the plumbing. The premise is simple: a modern LLM-based agent with tools for introspecting and driving the robot can translate intent into correct behavior. The interesting question is not whether this works but which agent harness you use. A harness decides how the agent plans, what tools it has, how it reads the robot’s workspace, and how it recovers from failure. Different harnesses make different tradeoffs.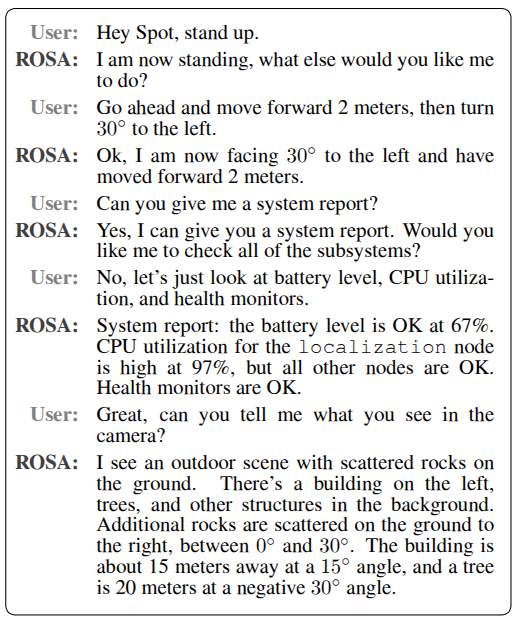
2. Harnesses
Three harnesses are on the bench. They are alternatives, not pieces of a single stack.ROSA (initial experiment)
ROSA was our initial experiment in this space, a purpose-built robotics agent that ships with a hand-written tool set for robot introspection and control, with tools that validate their inputs and outputs before anything reaches the robot.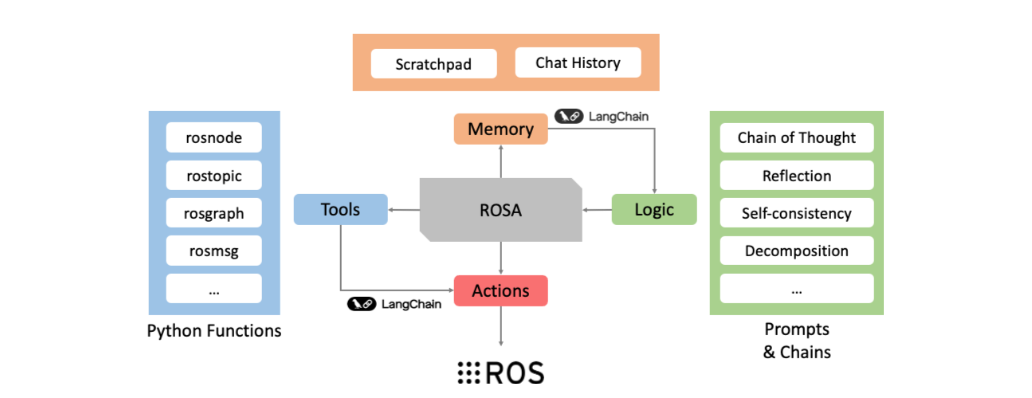
- Hand-crafted tools for the common robot operations
- Works with any LLM backend, OpenAI, Anthropic, open models
- Structured, validated responses
Claude Code
Claude Code is Anthropic’s general-purpose coding agent. Instead of a hand-crafted robotics tool set, it arrives with generic tools, read files, run commands, edit files, search the workspace, and it treats the robot’s codebase the same way it treats any other project.- No wrapper code to write
- Can read launch files, edit source, rebuild, and restart the stack
- Can combine code changes and live robot commands in a single session
NeMoclaw
NeMoclaw is NVIDIA’s robotics agent harness, built on the NeMo agent stack. We are currently bringing it up against the same robot adapter and will present results soon. All harnesses run against the same message bus and the same robot adapter.3. Demos
ROSA
Video by Oscar Poudel, Ph.D. candidate at NJIT.
Claude Code
Claude Code reading the workspace, reasoning about the robot’s interface, and driving it end-to-end.
Contact us to adapt this architecture for your robots.