Planning Example
Consider a planning application where robots have to transport containers and store them. We can cover every possibility of the system operation and every event and action that could be taken by the robot and we will soon face a combinatory explosion of the possible scenarios, vulnerability to failures from unexpected events. Automated planning (and re-planning) avoids this problem by allowing the system to compute a plan to achieve a goal from the current state of the system.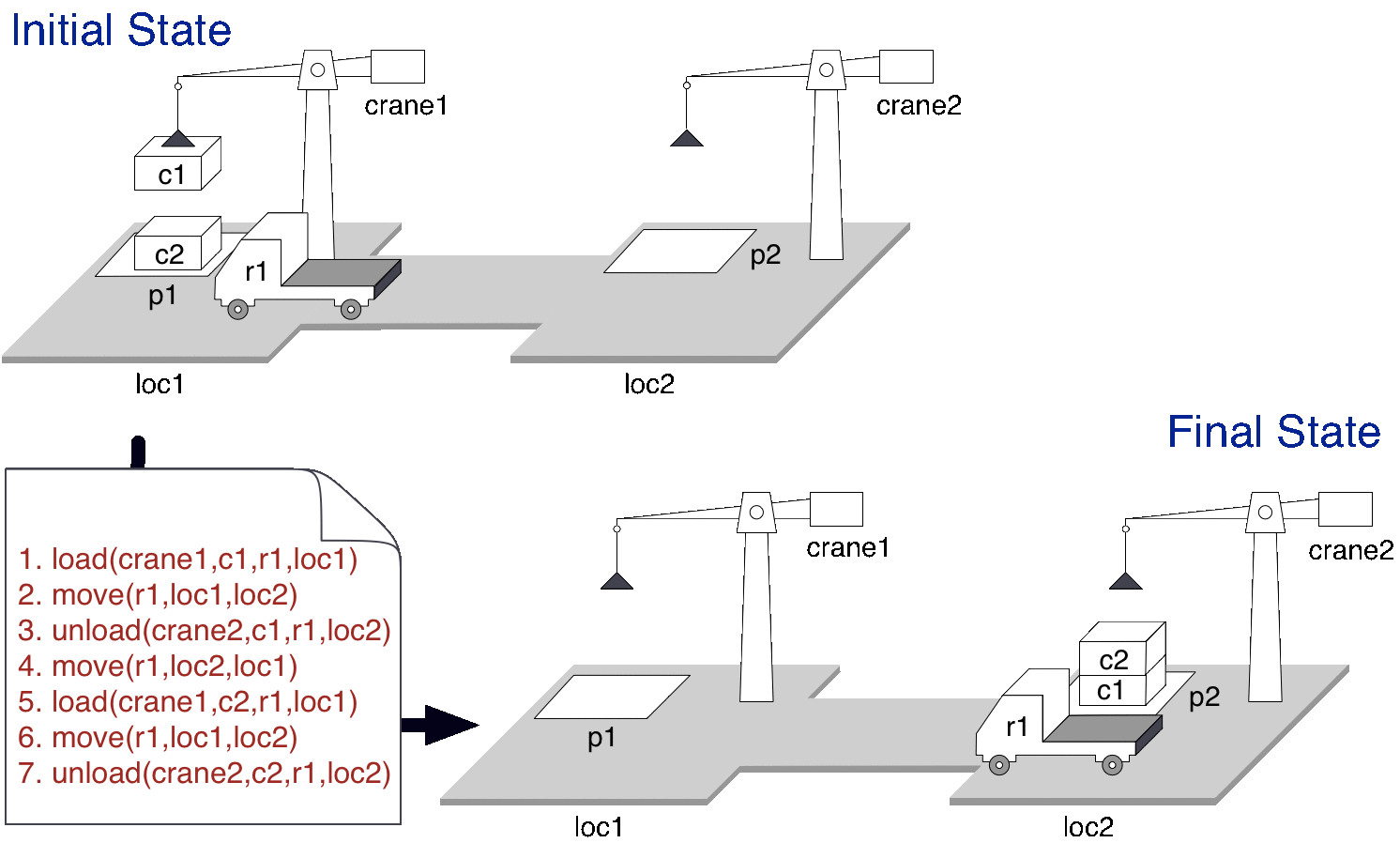
Topics
PDDL
Planning Domain Definition Language fundamentals.
Blocksworld
Classic PDDL example: blocksworld planning.
Logistics Domain
PDDL example: logistics planning.
Manufacturing Domain
PDDL example: manufacturing planning.